Deep Learning: Selected Ideas and Concepts
Thomas Keck (contact@tkeck.de)
Autonomous Driving
T. Pohlen, et. al. (12/2016)
Reinforcement Learning
N. Heess, et. al. (07/2017)
Speech Recognition & Speech Synthesis
Learn More
Reminder: Artificial Neural Networks
History
- 1950-1970
- Simple Perceptron without hidden layers
- Assumed incapability to perform operations like exclusive-or (Minsky and Papert 1969)
- Lack of computing power
- 1980-2000
- Invention of Backpropagation $\rightarrow$ Multi Layer Perceptrons
- Assumed incapability to train many layers due to local minima in high-dimensions
- Lack of computing power
- Slowly superseded by methods like SVM and BDTs
- 2000-2010
- Dawn of Deep-Learning ($\approx 10$ layer networks)
- Advances it algorithms (e.g. greedy layer-wise training, ReLU)
- More statistics (big data)
- Massive boost in computing power (due to GPUs)
- Assumed that training even more layers is difficult due to vanishing gradient problem
- 2010-2020
- Deep-Learning (Representation Learning)
- Batch Normalisation and architectures like ResNet allow for 1000 layer networks
- Even more statistics (bigger data)
- Massive boost in computing power (due to dedicated GPUs and TPUs)
- Networks seem to be fundamentally flawed ($\rightarrow$ adversarials)
Deep Neural Networks & Vanishing Gradient Problem
Example: ResNet
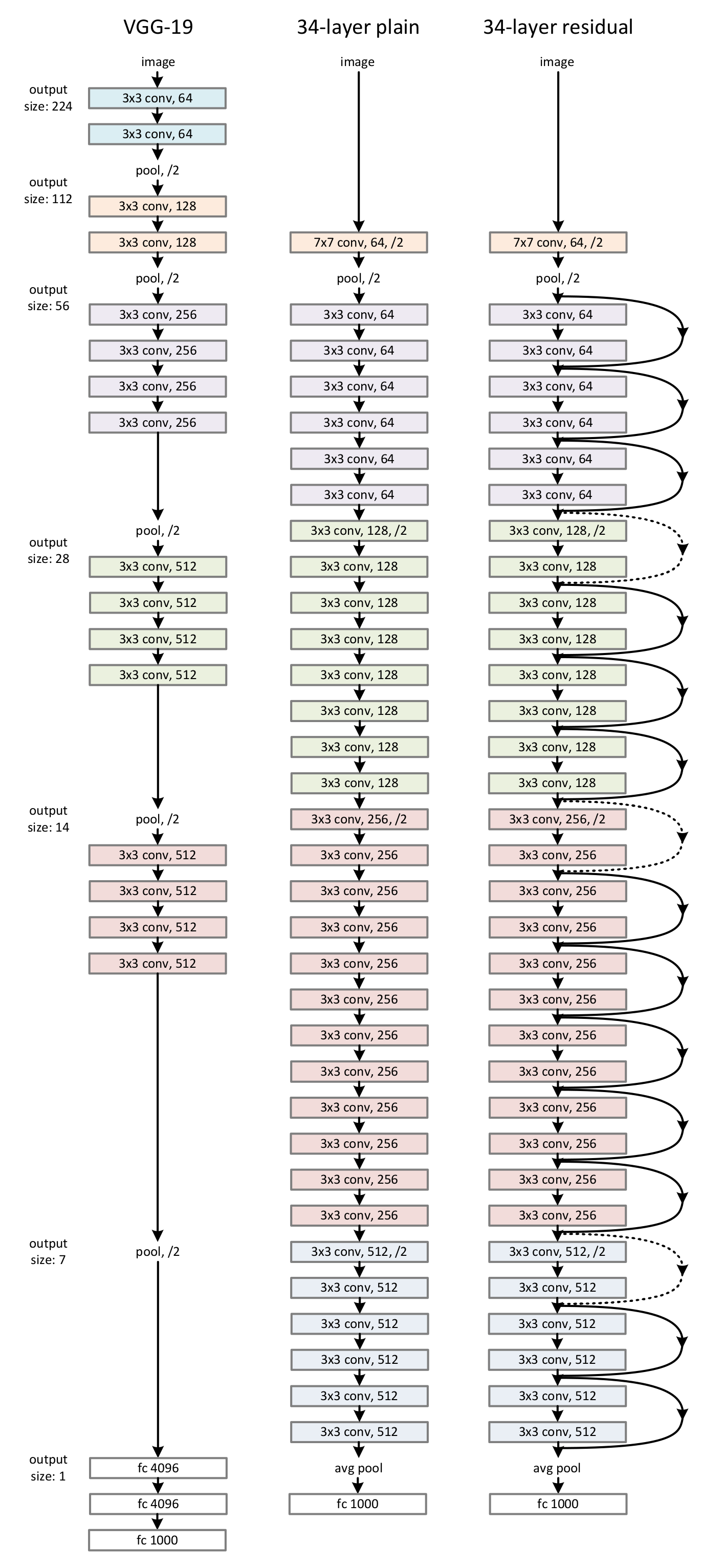
Techniques
- ReLU Activation
- He Initialisation
- Batch Normalisation
- Residual Network
34 layers (authors explored up to 1202 layers) used for image classification
Vanishing Gradient Problem
$$ y_{i+1} = \sigma \left(\sum^{N_i} w_i y_i \right) $$
Activation function is applied for each layer
$\rightarrow$ exploding or vanishing
$$ y_n = \sigma \left( \dots \sigma \left( \dots \sigma\left( \sum^{N_0} w_0 x \right) \right) \right) $$
$\rightarrow$ exploding or vanishing
activation
/ gradient
$$ y_n = \sigma \left( \dots \sigma \left( \dots \sigma\left( \sum^{N_0} w_0 x \right) \right) \right) $$
Training becomes unstable $\rightarrow$ very slow or no convergence
ReLU Activation Function
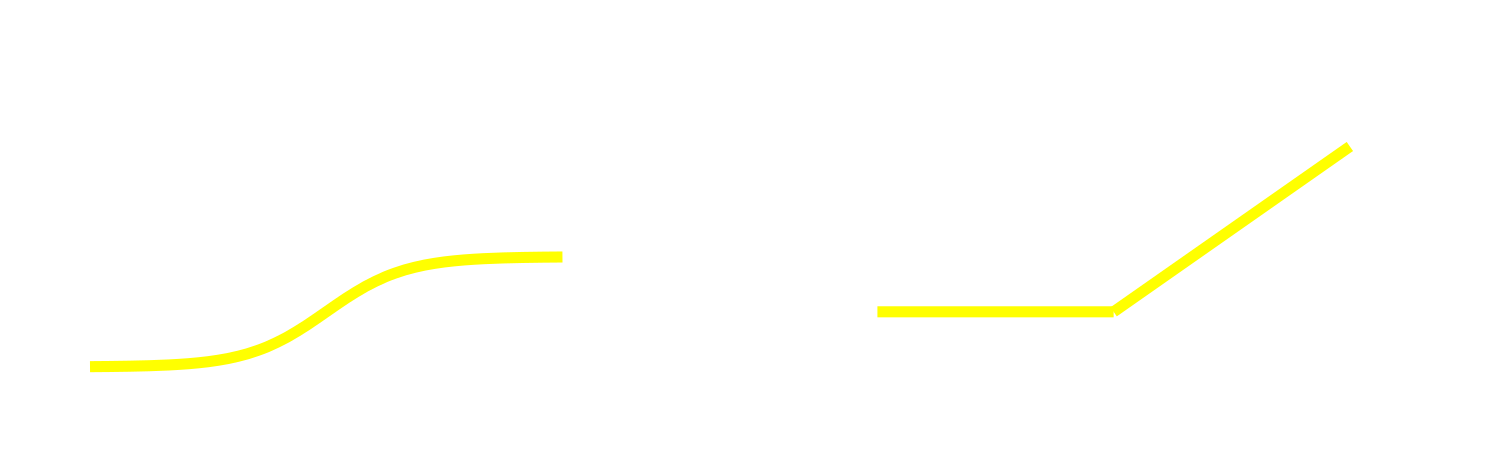
$$ \frac{\mathrm{d}}{\mathrm{d}x} \tanh = \frac{1}{\cosh^2} \le 1$$
Gradient vanishes in deep networks
$$ \frac{\mathrm{d}}{\mathrm{d}x} \max(0, x) = \left\lbrace \begin{array}{l} 1 \quad \textrm{for x } \gt 0 \\ 0 \quad \textrm{otherwise} \end{array} \right.$$
Gradient does neither vanish nor explode
He Initialization
$$ y_{i+1} = \max \left(0, \sum^{N_i} w_i y_i \right) $$
Weights can still lead to exploding or vanishing activations/gradients if
$$ \frac{1}{2} N_i \mathrm{Var}(w_i) \neq 1 $$
He Initialization (for ReLU)
$$ w_i \sim \mathcal{N}\left(0, \frac{2}{N_i} \right) $$ K. He, et. al. (02/2015)
Batch Normalisation
$$ y_{i+1} = \max \left(0, \sum^{N_i} w_i y_i \right) \quad \quad w_i \sim \mathcal{N}\left(0, \frac{2}{N_i} \right)$$
Weights are adjustable
$\rightarrow$ weights can still lead to exploding or vanishing activations/gradients
Batch Normalisation
$$ \hat{y_i} = \gamma \frac{y_i - \mathrm{E}(y_i)}{\sqrt{\mathrm{Var}(y_i)}} + \beta $$
- Normalise inputs of activation function with respect to batch
- Introduce learnable parameters to restore representation power
- Regularizes the network (Dropout can be removed)
S. Ioffe, C. Szegedy (03/2015)
Residual Network
Idea: Split layer into
identity
and residual
$ H(y_i) = $
$ F(y_i) $
$+$ $ y_i $
K. He, et. al. (12/2015)
Representation Learning
Why do we want to have a deep neural network?
- distributed representations– the number of input regions which can be distinguished grows exponentially
- depth– the ways to re-use learned features grow exponentially with the depth of the network
- abstraction– the learned features in the deeper layers are increasingly invariant to most local changes of the input
- disentangling factors of variation– the learned features represent independent properties of the input data
Convolutional Networks & Image Recognition






State of the Art: Inception-ResNet-V2
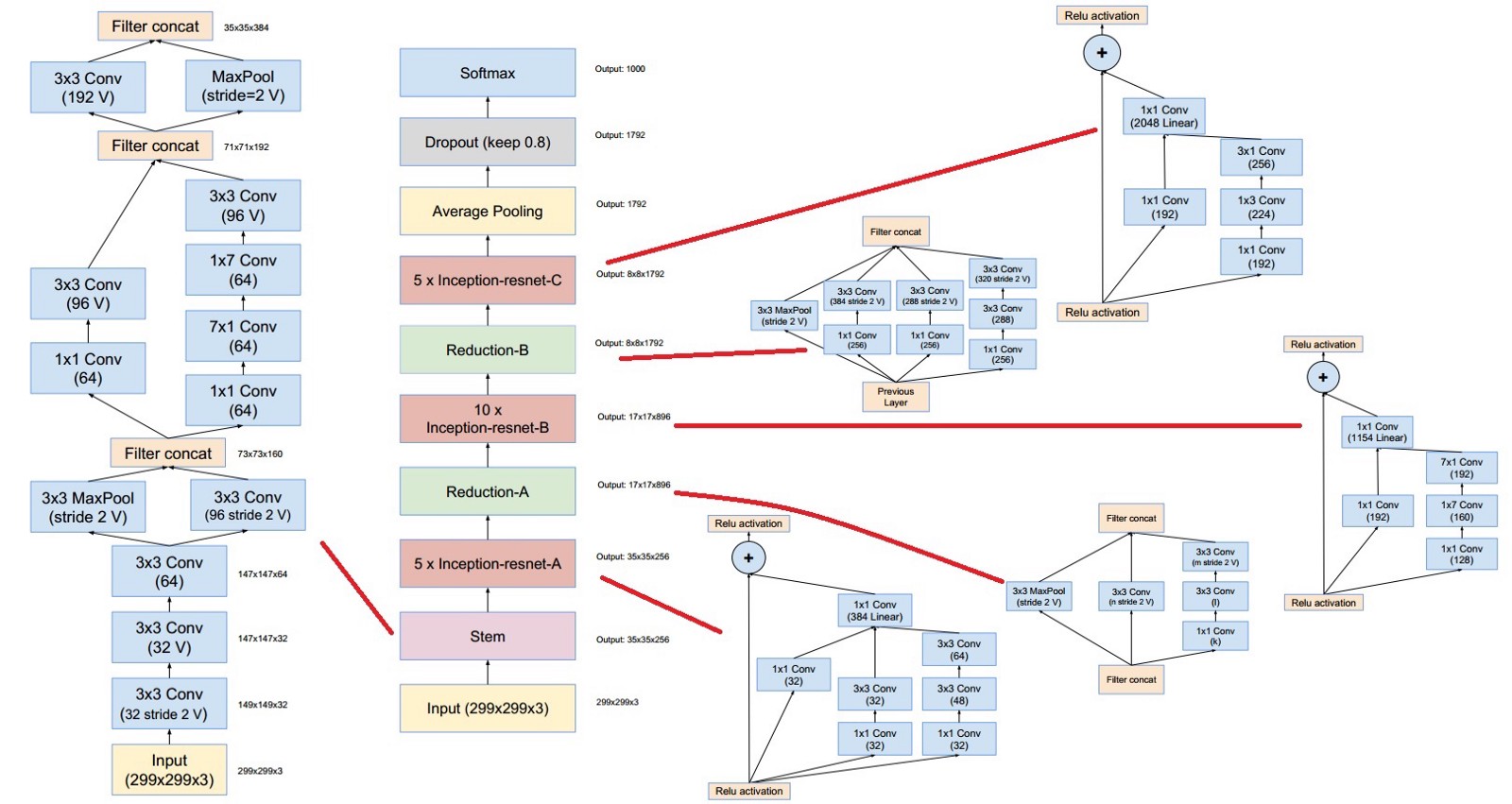
Image Recognition
Multi-class classification task using softmax$$ f(\vec{x}) = \underbrace{\frac{\exp \vec{l}}{\sum_{i=1}^{6} \exp l_i}}_{\mathrm{softmax}(l)} \quad \quad \textrm{where} \quad \vec{l} = \mathrm{NN}( \vec{x} )$$
Pixel Representation
Invariance under Transformations
Different strategies to build a classifier which is invariant under given transformations in the input space:
- Extract hand-crafted features that are invariant
- Use transformed copies during the training phase
- Penalize change in the output under input transformation → Tangent propagation
- Build invariance properties into structure of neural network → Convolution
Convolution
$M(x,y) = \sum_c \sum_{ij} $
$ K_c(i,j) $
$ P_c(x+i, y+j) $
Description
- Learnable filters (e.g. edge detector) organized in feature maps
- Each filter scans the image and detects a specific pattern
- Convolution refers to the spatial dimensions
- Input and outputs channels are still fully connected
Hyper-Parameters
- depth – number of filters (also known as kernels)
- size – dimension of the filter e.g. 3 × 3 or 3 × 3 × 4
- stride – step size while sliding the filter through the input
- padding – behavior of the convolution near the borders
Pooling
$M(x,y) = $
$ \max_{ij} $
$ P(x+i, y+j) $
Description
- Takes inputs from small region in the feature maps
- Reduces resolution and computation in following layers
- Increases insensitivity against small shifts
Hyper-Parameters
- depth – number of filters (also known as kernels)
- size – dimension of the filter e.g. 2 × 2 or 2 × 2 × 4
- stride – step size while sliding the filter through the input
- padding – behavior of the pooling near the borders
Inception
Convoluted channels are still fully connected
- For instance: Kernel size 3x3 with 100 input and 200 output channels
- Many parameters (3x3x100x200)
- High computational effort
$\rightarrow$ Most connections will be useless, can we do this in a sparse way?
Inception-v4 ResNet-v2 Module A
![]()
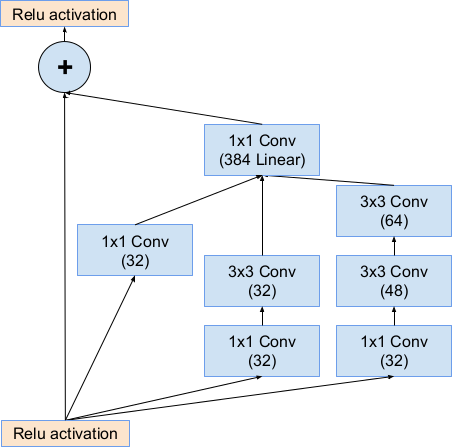
Inception
- Use small kernels in parallel (3x3, 7x1, 1x7)
- Bottleneck Architecture
- Reduce number of channels before convolution (1x1 conv)
- Restore number of channels after convolution (1x1 conv)
Global Average Pooling
Fully connected layers at the end are fully connected
- For instance: 1792 Channels with a resolution of 8x8
- Many parameters (8x8x1792)
- High computational effort
$\rightarrow$ Most connections will be useless, can we do this in a sparse way?
Global Average Pooling
- Position should be not important in the end
- Take the average activation over the entire image
- Reduces computation in following fully-connected layers
Regularization:Dropout
Idea: Prevent overfitting by randomly dropping neurons during the training
Prevents co-adaption of neurons: G. E. Hinton, et. al. (06/2012)
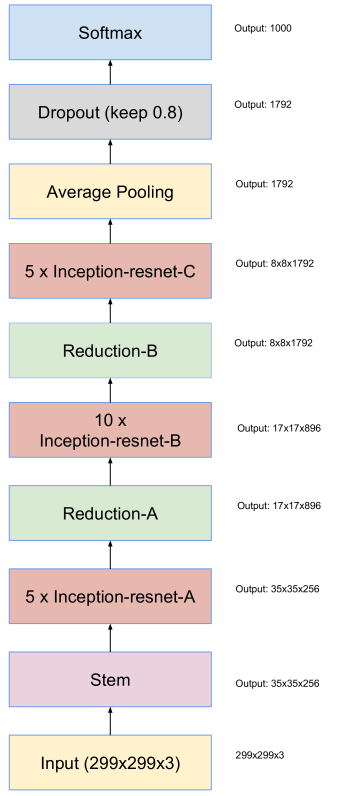
Summary: Inception-ResNet-V2
Recurrent Networks & Sequential Data Processing
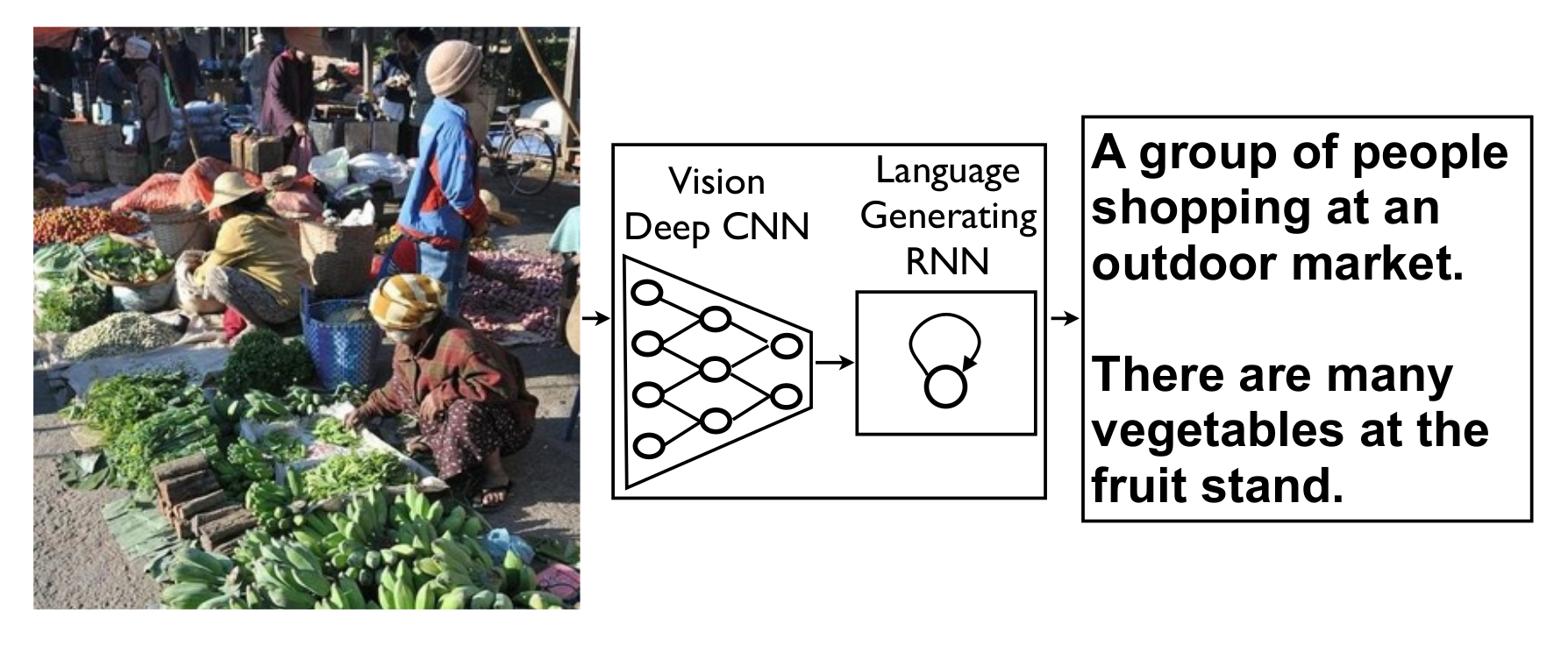
Example: Show and Tell
Recurrent Network
Recurrent Network
last output of the neuron is used as additional input
Backpropagation Through Time
Problem: Activation function will be applied iteratively ⇒ value (and gradient) vanishes or explodes
Solution: Long Short-Term Memory (LSTM) Cell
Can remember a value for a long time period
- Input gate decides when to update the stored value
- Output gate decides when to output the stored value
- Forget gate decides when to forget the stored value
One-hot Encoding
Howto turn text into numbers?
Categorial Mapping
$$ a \rightarrow 0 $$ $$ b \rightarrow 1 $$ $$ c \rightarrow 2 $$ $$ \dots $$ $$ z \rightarrow 25 $$
One-hot encoding
$ 0 \rightarrow $
$\left( \begin{array}{c} 1 \\ 0 \\ 0 \\ \dots \\ 0 \end{array} \right) $
$ 1 \rightarrow $
$\left( \begin{array}{c} 0 \\ 1 \\ 0 \\ \dots \\ 0 \end{array} \right) $
$ 2 \rightarrow $
$\left( \begin{array}{c} 0 \\ 0 \\ 1 \\ \dots \\ 0 \end{array} \right) $
$\dots$
$ 25 \rightarrow $
$\left( \begin{array}{c} 0 \\ 0 \\ 0 \\ \dots \\ 1 \end{array} \right) $
Example: Character-Level Language Model
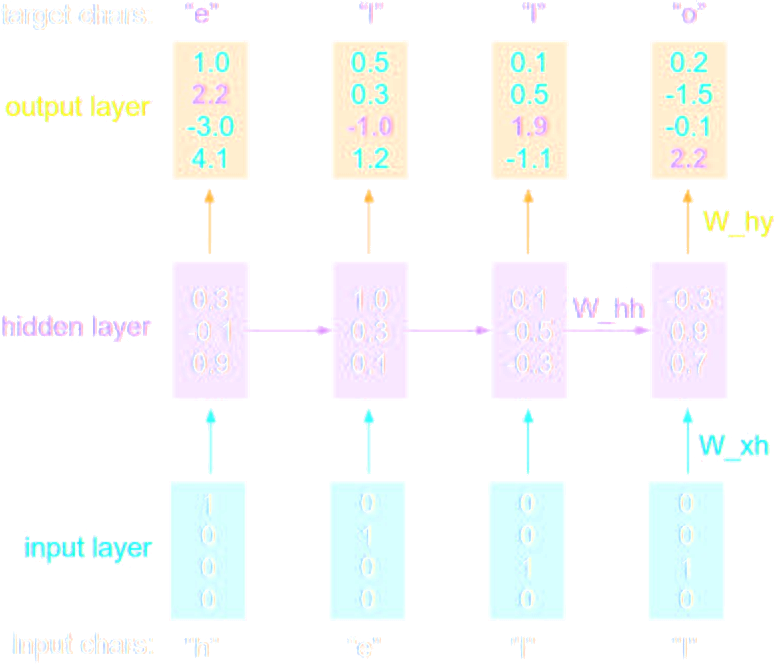
Example: Character-Level Language Model
Example: Character-Level Language Model
Word Embedding
One-hot encoding works well for characters ($\sim 26$) but what about words ($\gt 300000$)?$\rightarrow$
embed
high-dimensional word
-space into low-dimensional space with neural network
Adversarials & ???
Example: Adversarials in Image Segmentation



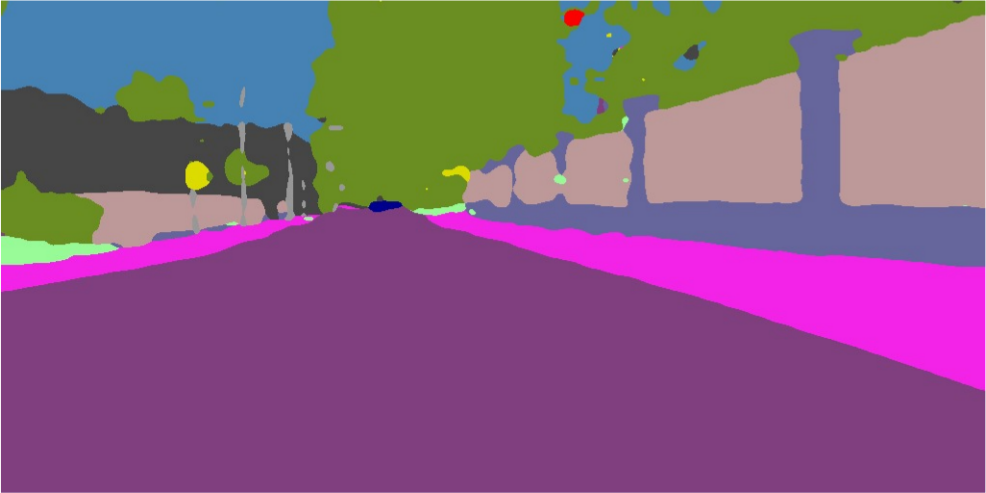
Adding
correlated noise
can change the output in an arbitrary way!!
Properties of Adversarials
- Dense $\rightarrow$ easy to find
- Artificial $\rightarrow$ do not appear naturally
- Transferable $\rightarrow$ high probability to fool different networks
- No effective defend-mechanism known
Goodfellow's Linearity Hypothesis
Neural Networks are too linearI. J. Goodfellow, et. al. (03/2015)
Wiggle on one pixel of an image $\rightarrow$ taylor expansion of network:
$$ f(\vec{x} + \epsilon \vec{n}) \approx f(\vec{x}) + \epsilon \frac{\partial \mathcal{f}}{\partial \vec{n}}$$
$$ f(\vec{x} + \epsilon \vec{n}) \approx f(\vec{x}) + \epsilon \frac{\partial \mathcal{f}}{\partial \vec{n}}$$
Wiggle on $N$ pixels of an image in a correlated way $\rightarrow$ taylor expansion of network:
$$ f(\vec{x} + \sum_i \epsilon \vec{n}_i) \approx f(\vec{x}) + \epsilon \sum_i \frac{\partial \mathcal{f}}{\partial \vec{n}_i} \approx f(\vec{x}) + N\ \epsilon\ \bar{\partial f}$$
$$ f(\vec{x} + \sum_i \epsilon \vec{n}_i) \approx f(\vec{x}) + \epsilon \sum_i \frac{\partial \mathcal{f}}{\partial \vec{n}_i} \approx f(\vec{x}) + N\ \epsilon\ \bar{\partial f}$$
Even if $\epsilon$ is small e.g. 1px, we can change the outcome by $N \cdot \epsilon$ if we coordinate our wiggeling!
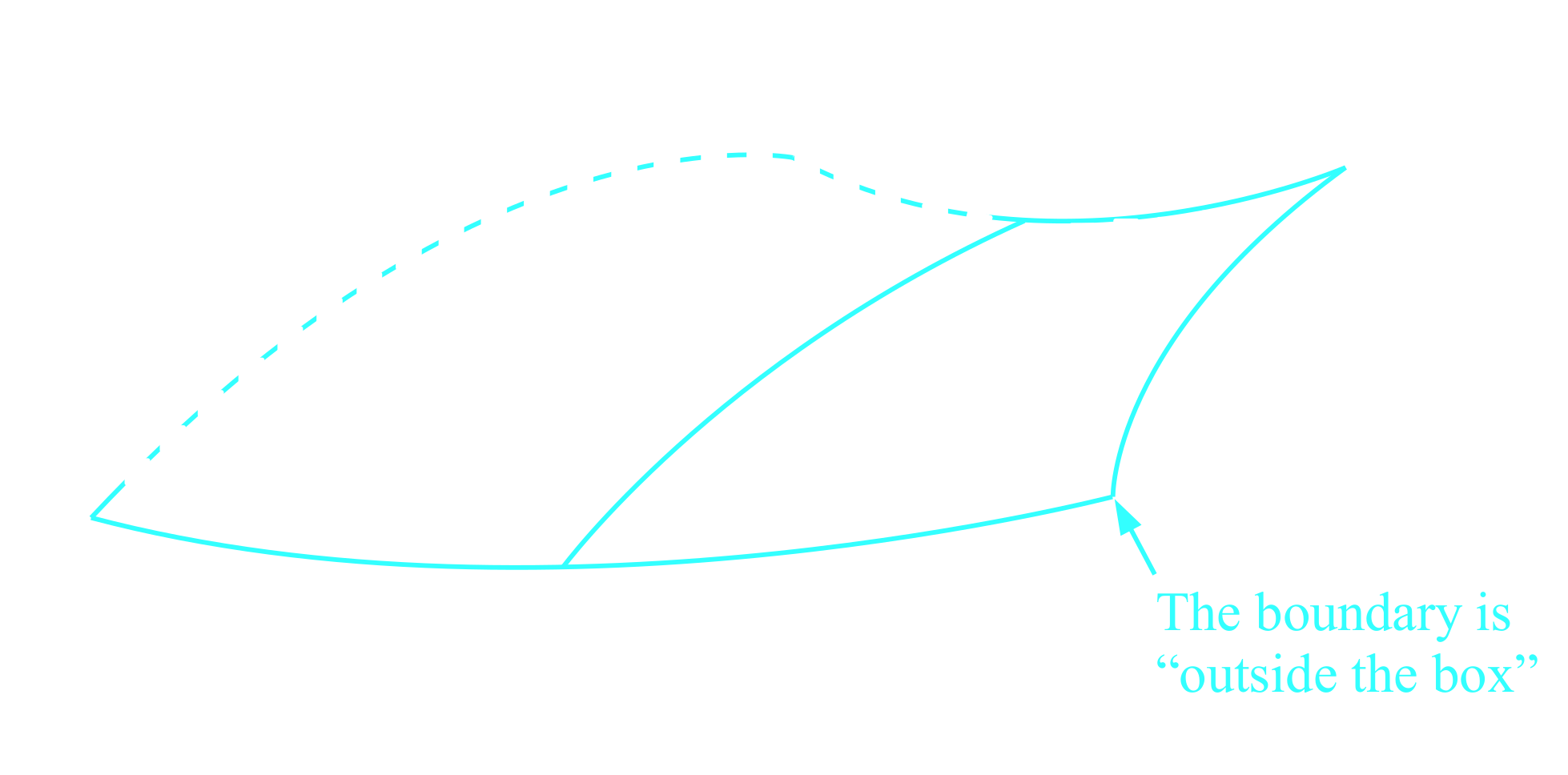
Off-Manifold Hypothesis
Adversarials are off-manifold.T. Tanay, L. Griffin. (08/2016)
Number of artificial 800x600 images
: $N_A = 255^{800 \times 600}$Number of natural 800x600 images
: $N_N \ll N_A$
Off-manifold one can easily cross a mis-aligned class-boundary
{kind=link}
{kind=link}
Example: Learning To Attack
Use neural network to generate adversarials!
- Can be targeted to achieve desired mis-classification
- Less salt and pepper noise
- Interpretable changes to the image
- Not transferable


Example: Adversarials for Humans and Computers
Example: Adversarials in the physical world
A. Kurakin, et. al. (02/2017)
Solution: ???
Proposed solutions:
- Augment training dataset with adversarials
- Detect adversarials
- Better regularisation
- ...
Not completely understood and certainly not solved $\rightarrow$ very hot research topic!
Outlook & References
Outlook
There will be workshop on Tensorflow
in the afternoon